PhotoRobot SynchroBox – Uživatelská příručka k funkčnosti a nastavení

Následující dokumentace popisuje funkčnost a nastavení PhotoRobot SynchroBox, multi-camera Controlleru podporujícího PhotoRobot MultiCam. Tyto informace mají podpořit zákazníky PhotoRobot, kteří si nedávno zakoupili zařízení a používají více než jeden fotoaparát s PhotoRobot. SynchroBox funguje jako multi-camera hub, který synchronizuje závěrku dvou nebo více fotoaparátů. Čtěte dál, abyste pochopili teorii, funkčnost a nastavení SynchroBoxu, které vám pomůže usnadnit základní pochopení a první použití zařízení.
Důležité: Počáteční instalaci systému PhotoRobot musí vždy provést oprávněný orgán PhotoRobot. Orgány s oprávněním k instalaci PhotoRobot jsou schváleným distributorem nebo zástupcem samotného výrobce. Dále se vždy před prvním použitím PhotoRobot vždy podívejte na Bezpečnostní informace a pokyny k PhotoRobot spolu s jakýmkoli manuálem, který je speciálně přiložen k vašemu zařízení.
Poznámka: Pro návod k montáži a prvnímu použití PhotoRobot MultiCam viz PhotoRobot MultiCam a instalace bezstředového stolu.
Technická uživatelská příručka SynchroBoxu
Děkuji a gratuluji k nákupu PhotoRobot. PhotoRobot představuje desetiletí přímých, profesionálních zkušeností a inovací v automatizované fotografii. Každé zařízení přináší ekosystém hotových řešení, s funkcemi přizpůsobitelnými jedinečným potřebám vašeho podnikání.
Vítejte ve PhotoRobot. Použijte následující technické informace k zahájení své cesty k pochopení a maximalizaci produkce ve studiu poháněném PhotoRobot.
1. PhotoRobot SynchroBox - Teorie
PhotoRobot SynchroBox je potřeba k synchronizaci závěrky fotoaparátu při použití dvou nebo více fotoaparátů se systémy PhotoRobot. SynchroBox funguje jako multikamerový uzel, který synchronizuje zachycení jednotlivých snímků různými kamerami přesně ve správný okamžik. Představuje řešení problému, který vzniká při práci s fotoaparáty s různými zpožděními závěrky, a podporuje až 8 fotoaparátů celkem.
Pro pochopení teorie SynchroBoxu si například vezměte sekvence standardního režimu zachycení versus režimu rychlého spinu s PhotoRobot.
Ve standardním režimu zachycení existuje následující sekvence.
a) Deska se pohybuje do požadovaného úhlu.
b) Deska se zastaví.
c) Fotoaparát fotografuje objekt.
d) Deska se začne pohybovat do dalšího úhlu.
V tomto scénáři není potřeba žádná úprava.
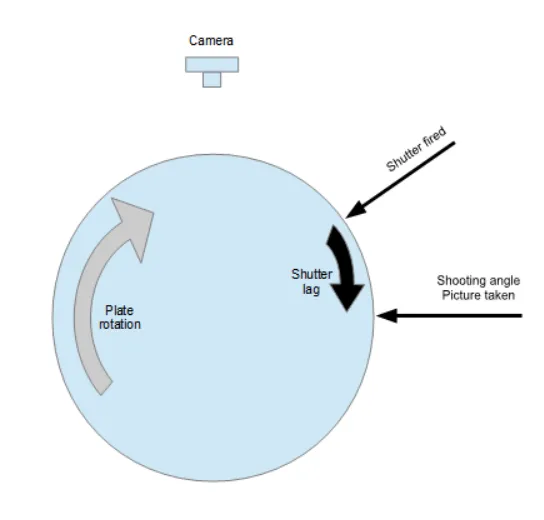
V režimu rychlého zachycení rotace vyžaduje sekvence několik dalších stupňů.
a) Deska začne otáčet předem danou rychlostí.
b) Řídicí jednotka rozpozná, že se blíží úhel k zachycení.
c) Řídicí jednotka předem střílí závěrku fotoaparátu pomocí závěrkového kabelu.
d) Kamera zahájí proces zachycení (pohyb záclony senzoru atd.).
e) Proces zachycení vyžaduje přibližně 50 milisekund ("zpoždění závěrky").
f) Deska je během zpoždění závěrky neustále v pohybu.
g) Deska dosáhne požadovaného úhlu přesně ve chvíli, kdy závěrka fotoaparátu skončí, a pořizuje snímk.
h) Řídicí jednotka rozpozná, že se blíží další úhel zachycení, a proces zachycení se opakuje s ohledem na zpoždění závěrky.
i) Rotace desky končí po 360 stupních, čímž se zastaví veškerý pohyb.
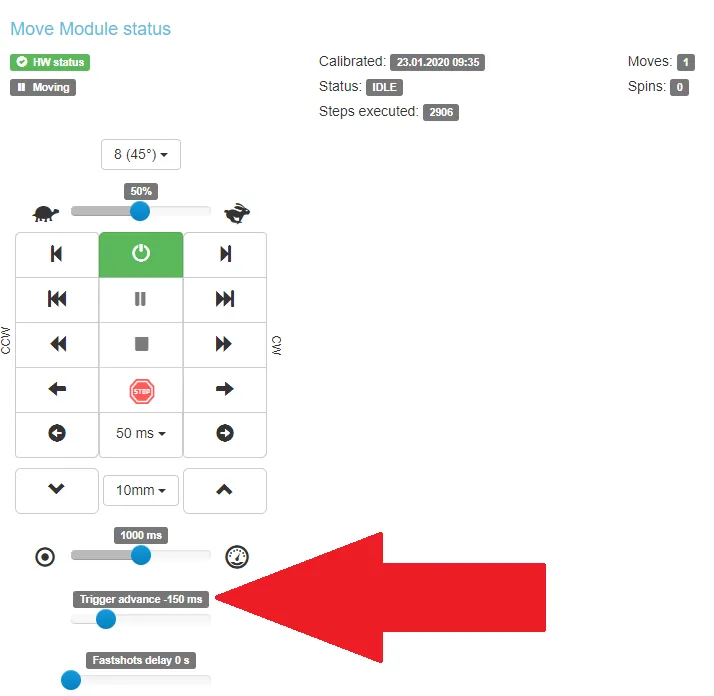
Poznámka: Protože každý fotoaparát má jiné zpoždění závěrky, je nutné upravit posuv závěrky řídicí jednotky pro každý konkrétní fotoaparát. To je možné u řídicí jednotky (generace 6) prostřednictvím servisního rozhraní s možností "Trigger advance". Hodnota "Trigger advance" musí být vyšší než zpoždění závěrky fotoaparátu. Například pokud je zpoždění závěrky fotoaparátu 80 ms, pak by "posun spouště" měl být přibližně stejný nebo větší než 90 ms.
2. Popis zařízení - PhotoRobot SynchroBox
SynchroBox je podle návrhu rackové zařízení určené pro synchronizaci závěrek fotoaparátů dvou nebo více fotoaparátů. Je to nezbytné při provozu jakéhokoli systému PhotoRobot s více než jednou kamerou současně. Jeden SynchroBox podporuje až 8 kamer, což poskytuje řešení pro obcházení různých zpoždění závěrky používaných fotoaparátů.


Vezměme si například scénář se dvěma kamerami a SynchroBoxem pouze jako splitterem pro obě kamery, bez nutnosti dalšího nastavení. Současně je hodnota "Trigger advance" u řídicí jednotky G6 nulová. Závěrka se pak spustí, když deska dosáhne požadovaného úhlu.
V tomto případě jsou kroky sekvence:
a) Deska dosáhne požadovaného úhlu.
b) Řídicí jednotka spouště závěrku fotoaparátu pomocí závěrkového kabelu.
c) Zpoždění závěrky u obou fotoaparátů se zpomaluje, zatímco deska se nepřetržitě pohybuje.
d) První kamera pořídí fotografii 50 ms za požadovaným bodem zachycení pomocí "požadovaného úhlu + X" stupňů.
e) Druhá kamera zachytí snímek 70 ms po požadovaném bodě zachycení pomocí stupňů "požadovaný úhel + Y".
f) Stupně hodnoty "Y" jsou větší než stupně hodnoty "X".
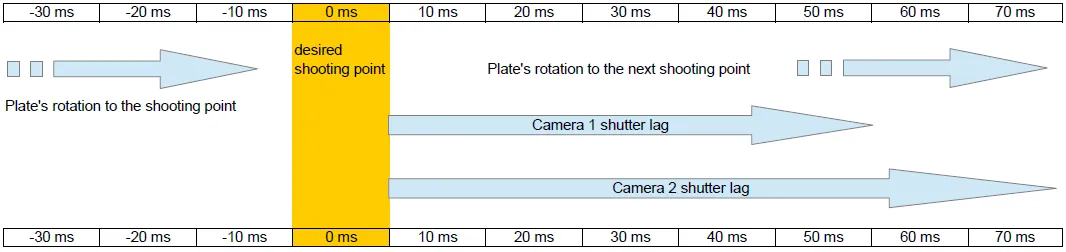
Výsledkem je, že není zachycen žádný záběr požadovaného úhlu. Proto je nutné nastavit se, aby oba fotoaparáty vyfotografovaly požadovaný bod zachycení ve správný okamžik.
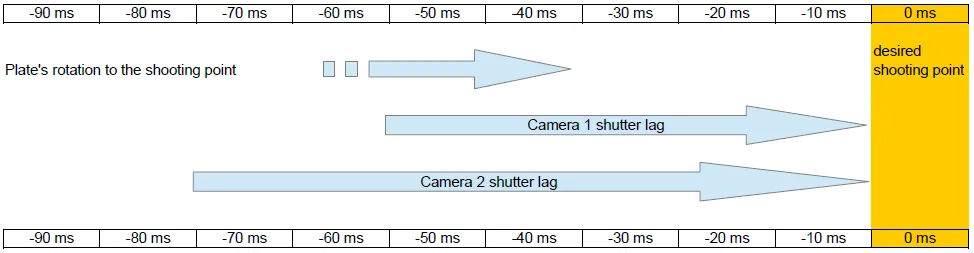
K tomu SynchroBox přijímá pulz "vystřelený závěrkou" z řídicí jednotky G6 a automaticky identifikuje délku pulzu.
Navíc SynchroBox uvádí hodnotu zpoždění závěrky pro každý připojený fotoaparát, která byla ručně zadána při nastavení.
Pomocí těchto dvou parametrů SynchroBox počítá a spouště závěrku každého fotoaparátu s odpovídajícím posunem.
3. Jak měřit zpoždění závěrky fotoaparátu
Pro měření zpoždění závěrky fotoaparátu je nutné mít PhotoRobot s libovolnou rotující deskou, řídicí jednotku G6+, a fotoaparát připojený pomocí závěrkového kabelu k řídicí jednotce.
Dále musí být k fotoaparátu připojen lokální počítač s aplikací PhotoRobot Controls pomocí USB kabelu.
Nakonec je k dokončení následujících kroků nezbytný 360stupňový úhloměr (ke stažení online).
a) Umístěte úhloměr na desku zařízení PhotoRobot, přičemž se použije jakýkoli ukazatel umístěný mimo desku a směřující k hraně.
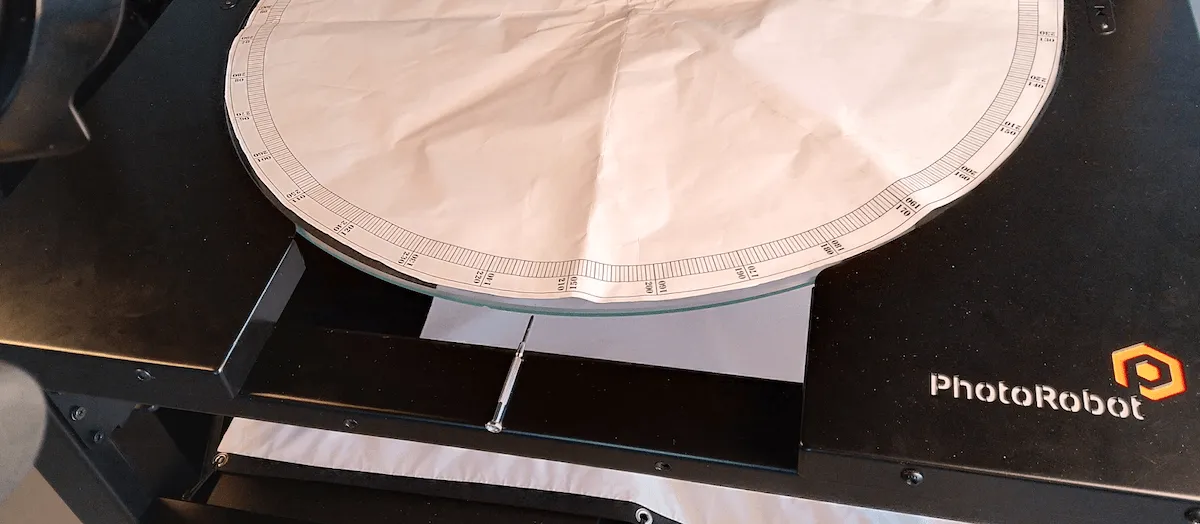
b) Otáčet destičku, dokud ukazatel nebude na nule. Poznámka: Tento krok je možný ručně i při vypnutém elektrických motorech.
c) Spustit aplikaci PhotoRobot Controls, přihlásit se do svého účtu a vytvořit položku v pracovním prostoru s ohledem na danou konfiguraci. Poté otevřete režim Capture a otevřete složku "Other".
d) Poté v nové záložce prohlížeče otevřete servisní rozhraní řídicí jednotky (G6), která poskytuje kontrolu nad deskou pomocí své IP adresy.
e) V servisním GUI nastavte robota s následujícími parametry:
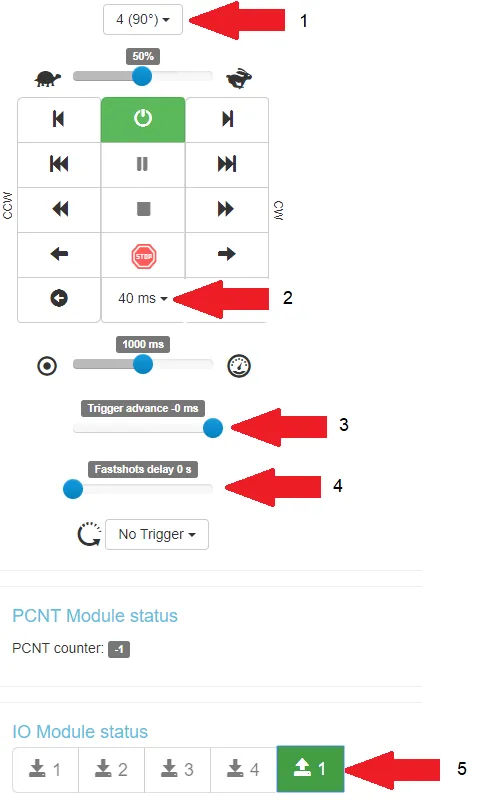
- 1 = 4 snímky o 90 stupňů;
- 2 = délka 40 ms pulzu pro spuštění závěrky;
- 3 = spouštěcí posun 0 ms (bez posunu);
- 4 = žádné zpoždění při rychlých výstřelech
- 5 = je aktivováno poloviční stisknutí závěrky
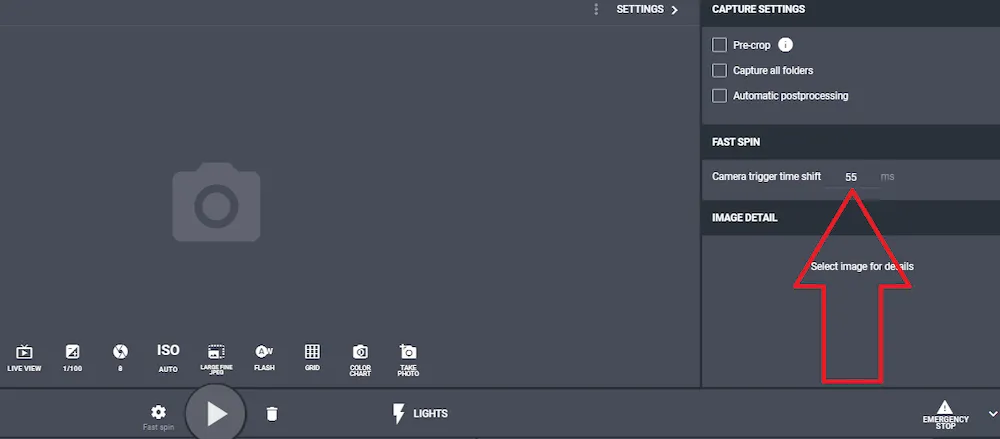
f) Začněte sekvenci kliknutím na šipku vpravo v pravém dolním rohu ovládacího panelu:
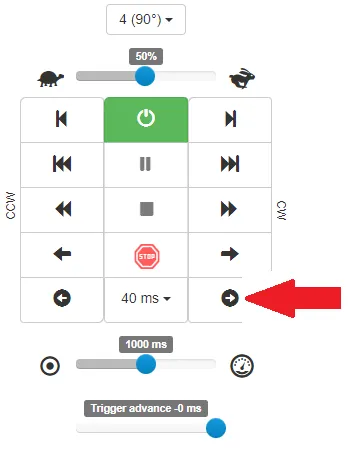
Poznámka: Sekvence začíná na 90 stupních a končí na 0 stupních. Současně jsou všechny fotografie zachyceny do složky "Other" v aplikaci Controls, jak bylo dříve nastaveno.
Například viz následující výstupy vzorků (s rotačním směrem doleva):
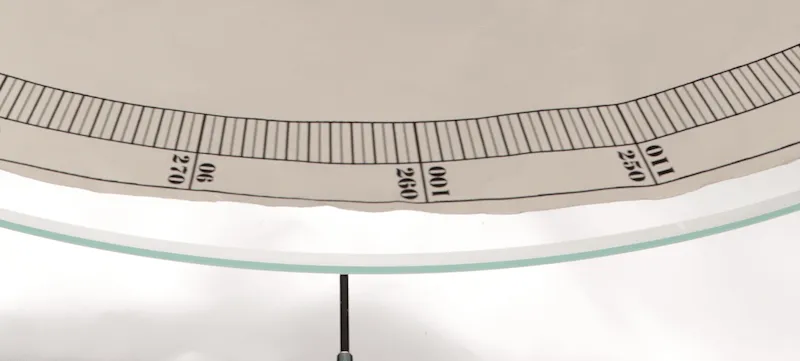
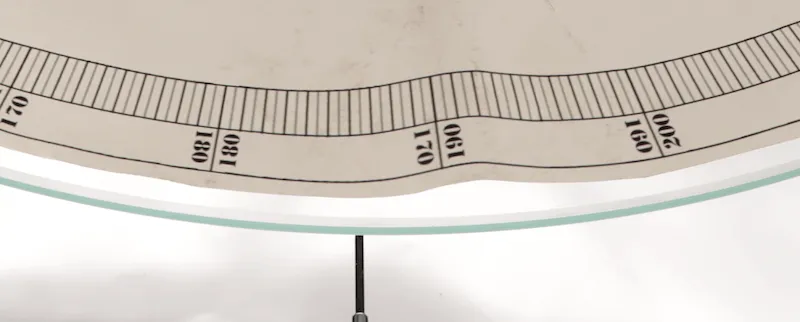
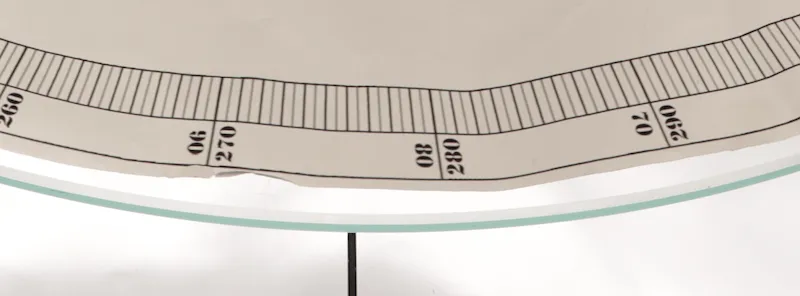
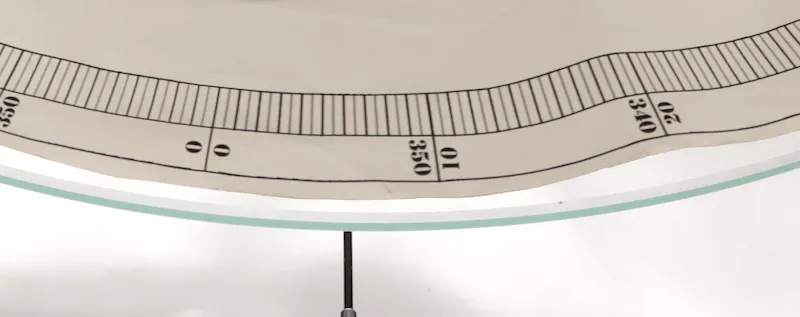
- Poznámka: V těchto příkladech bylo zachycení obrazu přibližně 6 stupňů po vystřelení spouště.
g) Následovně, aby se 6 stupňů převedlo na počet milisekund (ms), v tomto případě zahajte kontinuální otáčení desky PhotoRobot stejnou rychlostí jako v předchozím kroku v servisním GUI.
- Zapněte stopky a zaznamenávejte čas po 10 kol.
- V tomto testovacím případě je výsledná hodnota 61 sekund (61 000 ms).
- To znamená, že 10 ran je 10 * 360 stupňů (3 600 stupňů).
- Časový pohyb o 1 stupeň trvá 61 000 ms / 3 600 stupňů, což odpovídá 16,94 ms.
- Časový pohyb o 6 stupních trvá 16,94 ms * 6, což odpovídá 101,64 ms.
- Přibližné zpoždění závěrky je tedy přibližně 102 ms.
h) Nakonec je nutné zopakovat všechny předchozí kroky, aby bylo možné identifikovat zpoždění závěrky u každého používaného fotoaparátu.
4. Nastavení SynchroBoxu
Pro nastavení SynchroBoxu je předpokladem instalovaná řídicí jednotka (G6) a plně funkční. Navíc ideálně by měly být 2 nebo více fotoaparátů od stejného výrobce a stejného modelu, každá s známým zpožděním závěrky.
V tomto případě použijte následující kroky k nastavení SynchroBoxu.
4.1. Připojte SynchroBox k řídicí jednotce G6 pomocí závěrkového kabelu. Poznámka: Tento závěrkový kabel poskytuje PhotoRobot jako součást dodávky SynchroBox, nebo pod číslem dílu KHCAR1R05. Kabel závěrky připojuje port "OUT" řídicí jednotky G6 k portu SynchroBox "->IN" (ten menší, ne ten druhý "=>IN").
4.2. Připojit SynchroBox k síti pomocí standardního ethernetového kabelu, přičemž stejnou podsíť připojujete k řídicí jednotce.
4.3. Připojit všechny kamery, které budou fungovat, ke SynchroBoxu pomocí závěrkových kabelů.
Poznámka: Závěrkové kabely pro SynchroBox ke fotoaparátům jsou dodávány PhotoRobot pod čísly dílů KHCARCJ (Canon Jack 2,5 mm Connector) nebo KHCARN3 (konektor Canon N3) plus prodlužovací KHCAR1R05, případně jako tzv. sada závěrkových kabelů.

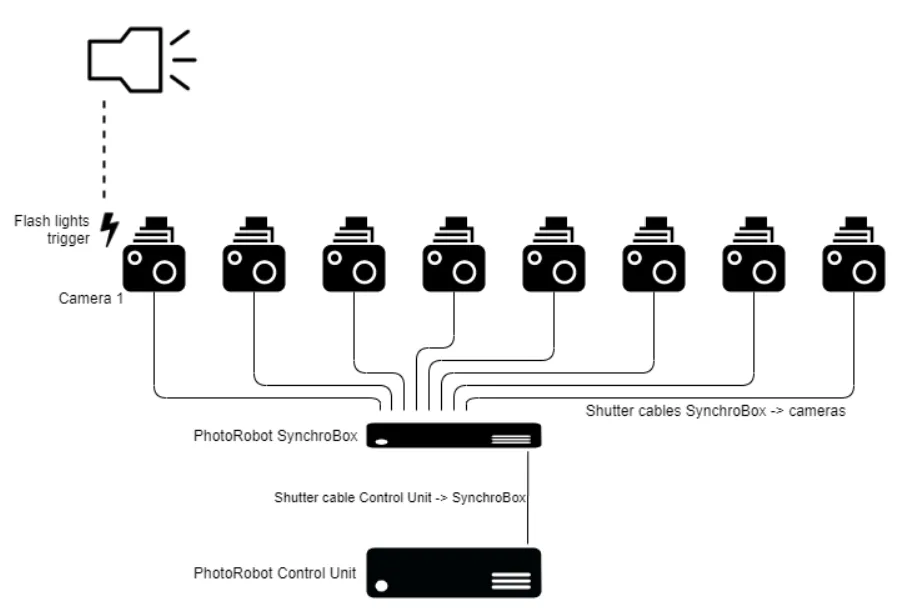
4.4. Mějte na paměti, že Kamera 1 (port 1 SynchroBoxu) drží a ovládá spouštěcí zařízení pro blesky. Tento fotoaparát musí mít největší zpoždění závěrky.
4.5. Nastavte hodnotu "Trigger advance" řídicí jednotky (G6) podle zpoždění závěrky nejpomalejšího fotoaparátu (dříve popsáno v sekci 1 tohoto dokumentu). Poznámka: Při používání aplikace PhotoRobot Controls mějte na paměti, že tato hodnota je upravena / nahrazena hodnotou nastavenou pro režim zachycení – rychlé otáčení:
4.6. Dále přistupte ke servisnímu rozhraní SynchroBoxu zadáním IP adresy ve formátu URL do vašeho webového prohlížeče.
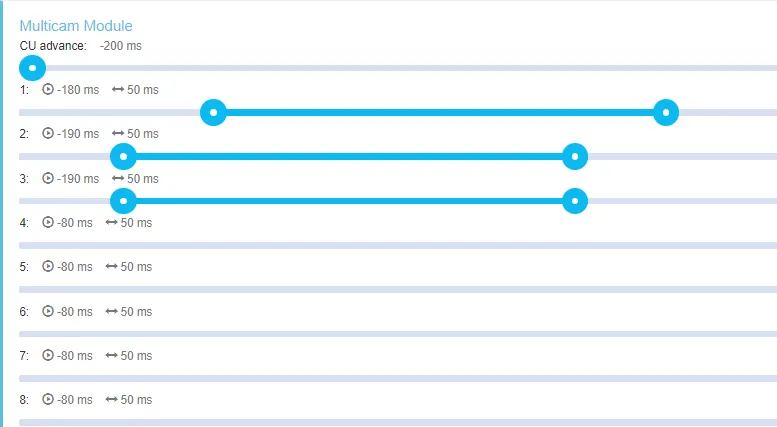
4.7. Nastavte první posuvník "CU advance" na stejnou hodnotu jako v řídicí jednotce, nebo na odpovídající hodnotu v PhotoRobot Controls. Poznámka: Mějte na paměti, že pokud se tyto dvě hodnoty liší, hodnota v PhotoRobot Controls bude mít přednost. Pak je zde 8 posuvníků odpovídajících 8 portům na SynchroBoxu. Posuvníky mají dvě hodnoty: posun (levé tlačítko) a délku pulzu (pravé tlačítko). Pokročilá hodnota odpovídá zpoždění závěrky řízeného fotoaparátu (s nejmenší reálnou hodnotou přibližně -50 ms). Délka pulzu pak souvisí s časovým rámcem, během kterého kabel závěrky fotoaparátu udržuje kontakt. Tuto hodnotu poskytuje výrobce fotoaparátu, nebo pokud není známa, lze ji nastavit na 40 - 60 ms.
4.8. Nastavte vstupní kanál v GUI služby SynchroBox. Poznámka: Při použití kabelů závěrky od PhotoRobot bude nastavení vždy následující.
- V přístavu: A = zaostření, B = spoušť
- Porty 1 - 8: A = spoušť, B = zaostření
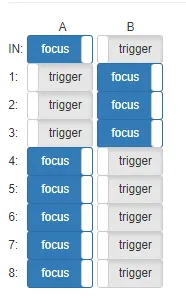
- Všimněte si, že v uvedeném příkladu jsou nastaveny pouze kamery 1, 2 a 3.
- Protože PhotoRobot je určen k použití blesků, nastavte čas závěrky fotoaparátu 1 na 1/100 nebo 1/125.
4.9. Nakonec nastavte počáteční nastavení všech ostatních fotoaparátů na mnohem delší čas závěrky, např. 1/30 - 1/60. To pomůže zohlednit možné rozdíly v zpoždění závěrky mezi používanými fotoaparáty. Delší časový rámec také zajistí, že všechny fotoaparáty dohoní vrchol blesku ze všech stroboskopů. Pokud funguje správně, je možné experimentovat snížením času závěrky ostatních fotoaparátů, pokud je to nutné.
5. Vícenásobné SynchroBox nastavení
SynchroBox podporuje maximálně 8 kamer. Pokud je potřeba více než 8 kamer, je možné počet používaných SynchroBoxů vynásobit.

- Připojte OUT port prvního SynchroBoxu k IN portu dalšího SynchroBoxu, pomocí stejného závěrkového kabelu, který spojuje řídicí jednotku se SynchroBoxem. Tento kabel závěrky je poskytován společností PhotoRobot jako součást doručení přes SynchroBox nebo pod číslem dílu KHCAR1R05.


Řada EOS Rebel


Řada EOS DSLR


Řada bezzrcadlových fotoaparátů EOS M


Řada PowerShot


Zblízka / Z ruky

Řada Canon EOS Rebel nabízí digitální zrcadlovky vhodné pro začátečníky se solidní kvalitou obrazu, intuitivním ovládáním a všestrannými funkcemi. Tyto fotoaparáty jsou ideální pro nadšence do fotografování a poskytují spolehlivé automatické ostření, otočné dotykové obrazovky a nahrávání videa v rozlišení Full HD nebo 4K.
Připojení
Rozlišení (MP)
Usnesení
Digitální zrcadlovky Canon EOS poskytují vysoce kvalitní snímky, rychlé automatické ostření a všestrannost, takže jsou ideální pro fotografování i produkci videa.
Připojení
Rozlišení (MP)
Usnesení
Bezzrcadlové fotoaparáty Canon řady EOS M kombinují kompaktní design s výkonem podobným digitální zrcadlovce. Tyto fotoaparáty jsou vybaveny vyměnitelnými objektivy, rychlým automatickým ostřením a vysoce kvalitními obrazovými snímači a jsou skvělé pro cestovatele a tvůrce obsahu, kteří hledají přenositelnost bez obětování kvality obrazu.
Připojení
Rozlišení (MP)
Usnesení
Řada Canon PowerShot nabízí kompaktní, uživatelsky přívětivé fotoaparáty pro příležitostné fotografy a nadšence. Modely od jednoduchých kompaktních kamer až po pokročilé kamery se zoomem poskytují pohodlí, solidní kvalitu obrazu a funkce, jako je stabilizace obrazu a 4K video.
Připojení
Rozlišení (MP)
Usnesení
Kamery Canon pro detailní fotografování a ruční fotoaparáty jsou určeny pro detailní fotografování a natáčení videa zblízka. Jsou kompaktní a snadno použitelné, nabízejí přesné ostření, zpracování obrazu ve vysokém rozlišení a všestranné makro funkce – ideální pro vlogování, produktovou fotografii a kreativní záběry zblízka.
Připojení
Rozlišení (MP)
Usnesení


